


Laser Scanners/laser range finder Application
Safety
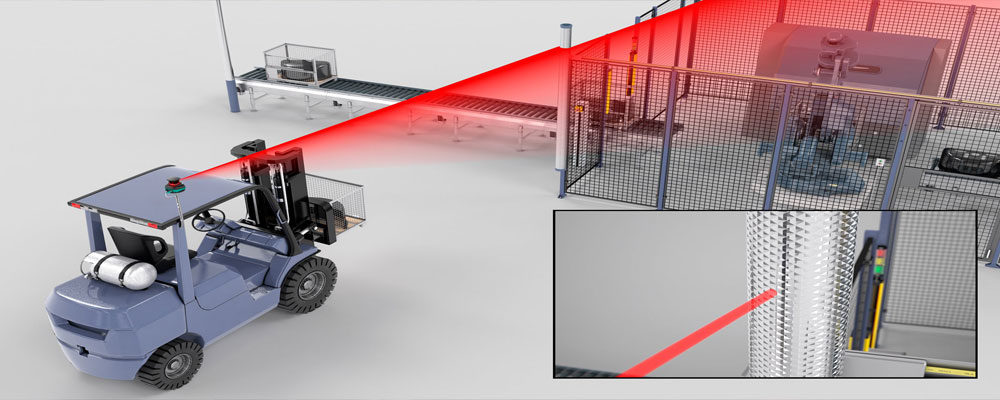
Increased automation requires a safe working environment. AGV’s and other autonomous vehicles need vision to see if their path is clear. Path mapping sensors and obstacle / anti collision sensors provide “sight” for safe working.
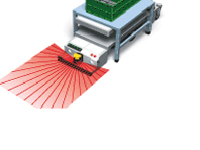
Patterns can be switched according to AGV travelling routes for object detection and collision prevention
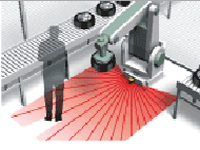
Detects if anything enters or left behind in the hazardous area.

Prevents an unauthorized access to hazardous area.
Device’s displacement is detected by the reference monitoring function thereby preventing the access to hazardous area through the gaps.


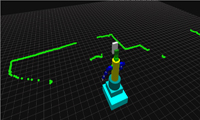
The actual position of a robot or AGV can be determined in several ways:
Mapping of the surroundings and reference to a plan or map is one possibility.
Determination of position relative to landmark points natural or artificial is another:
102, Shiv-Shakti Industrial Premise,
Opp. Damodar Park, L.B.S. Marg,
Ghatkopar (West), Mumbai - 400 086.
INDIA.
+ 91-22-2500 4225 / 2500-4226
+ 91-22-2500 3590